Exail,以前iXblue该公司展示了其三轴量子惯性传感器,该传感器由iXAtom联合实验室开发,该研究团队与波尔多的LP2N实验室共享。
Exail相信这样的仪器将使用户能够在三维和任何方向上连续跟踪和测量加速度——这是开发利用量子优势的无漂移惯性导航系统的重要一步。
根据Exail的说法,惯性导航传感器必须以高速率提供连续信号,并在很长一段时间内保持其准确性和灵敏度。如果当前的导航传感器提供高性能,它们会漂移一段时间。量子传感器非常精确和稳健,但它们在测量过程中存在固有的死时间,并且具有较低的运行动态。通过结合这两种技术——以及两家学术和工业合作伙伴各自的专业知识——iXAtom团队开发了首个混合多维量子惯性传感器。
iXAtom团队声称,该传感器以经典传感器的速率(带宽)提供连续信号,但由于量子测量提供了原位和实时校准,精度提高了50倍。

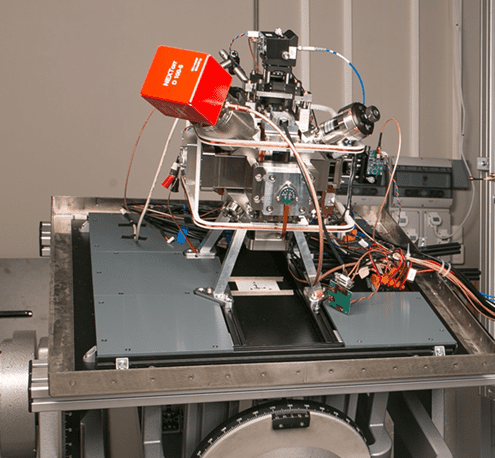
为了开发这种传感器,该团队使用了在真空室中自由落体冷却到百万分之一度的原子。这些原子形成一个惯性参考,通过原子干涉测量法,将其与三个参考镜的运动进行比较,这三个参考镜定义了用于测量的三束激光的三个正交方向。在每个反射镜上,刚性固定一个机械加速度计来实现杂交。这是第一个不需要根据预定义的测量方向进行精确校准的量子传感器,因为它自己决定了被测加速度的方向。
该架构基于最小数量的激光束,紧凑性是未来在实际条件下部署这些传感器的关键参数。
Exail认为,这是利用量子技术发展惯性导航系统的重要一步,可以完全克服导航系统使用GNSS等外部信号重新校准的需求。