Blue Robotics是海洋机器人系统、零部件和组件的领先开发商。由于主要关注成本和可获得性,我们的海洋ROV(远程操作车辆),水下推进器和配件能够为商业,研究和勘探应用提供广泛的任务。

我们的硬件和软件都是基于开源设计的,这使得业余爱好者和专业人士都可以很容易地使用它们,并允许大量的定制、修改和重新配置。我们的在线论坛为我们蓬勃发展的海洋ROV用户社区提供支持,资源等等。
跳转到:


Blue Robotics是海洋机器人系统、零部件和组件的领先开发商。由于主要关注成本和可获得性,我们的海洋ROV(远程操作车辆),水下推进器和配件能够为商业,研究和勘探应用提供广泛的任务。
我们的硬件和软件都是基于开源设计的,这使得业余爱好者和专业人士都可以很容易地使用它们,并允许大量的定制、修改和重新配置。我们的在线论坛为我们蓬勃发展的海洋ROV用户社区提供支持,资源等等。
跳转到:

的BlueROV2是一种高性能、高度可配置的ROV,专为水下检查、研究和海洋勘探而设计。
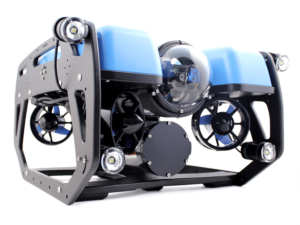
该平台采用开源硬件和软件,具有前所未有的灵活性和可扩展性,用户可以轻松地对ROV部件进行改进和升级,以完成100米(330英尺)深的各种任务。


栓系式ROV采用了6个T200推进器矢量配置,提供了出色的推重比,并能够向任何方向精确移动。该系统可以扩展到八个推进器通过我们的重型配置改装套件,并具有可调增益水平,在极低的速度下进行精确控制,以及高功率,以克服电流和承载重负载。


BlueROV2配备Fathom ROV系绳,长度从25米(82英尺)到300米(984英尺)不等。

 水下ROV具有一个前置的高清晰(1080p, 30fps)广角低光摄像头,这是专门为平台优化的。摄像头的倾斜机制使飞行员即使在飞行器水平时也可以向上或向下看。两盏或四盏可调光灯可提供高达6000流明的照明。
水下ROV具有一个前置的高清晰(1080p, 30fps)广角低光摄像头,这是专门为平台优化的。摄像头的倾斜机制使飞行员即使在飞行器水平时也可以向上或向下看。两盏或四盏可调光灯可提供高达6000流明的照明。
 BlueROV2的开放式框架设计类似于研究级或工作级ROV,可以轻松安装各种配件,包括定制和第三方配件。
BlueROV2的开放式框架设计类似于研究级或工作级ROV,可以轻松安装各种配件,包括定制和第三方配件。
我们还提供了一个多功能的有效载荷滑橇,进一步扩展框架,并便于连接更大的有效载荷。
我们提供一系列部件和配件,使您能够扩展您的BlueROV2的功能,包括:

BlueROV2集成了Ping360
BlueROV2基于广泛使用的ArduSub海底车辆控制固件,提供了大量的特性和功能,以及广泛的扩展空间。


系绳式ROV可以通过Windows、Mac或Linux笔记本电脑和手柄控制器进行控制。一个直观和用户友好的用户界面是由开源QGroundControl应用程序提供的,它提供了实时视频流,传感器反馈和信息,以及更改设置和配置的能力。
规格:
| 尺寸(长×宽×高) | 457 x 338 x 254毫米(18 x 13.3 x 10英寸) |
| 空气重量 | 10-11公斤(22-24磅)带镇流器 |
| 净浮力 | 9-10公斤(20-22磅)带镇流器 |
| 有效载荷能力 | 1 - 1.2公斤(2.2至2.6磅)-载荷取决于 |
| 最大额定深度 | 100米(330英尺) |
| 最大测试深度 | 130米(425英尺) |
| 电池寿命(18Ah锂离子电池) | ~2小时(正常使用) ~4小时(轻度使用) |
了解更多并在网上购买:BlueROV2远程操作车辆
 的T200一样是一种用于auv和rov的强大而紧凑的水下推进器,也可用于将各种浮动平台转换为usv(无人水面舰艇)。
的T200一样是一种用于auv和rov的强大而紧凑的水下推进器,也可用于将各种浮动平台转换为usv(无人水面舰艇)。
它具有专利的全泛水无刷电机设计,提供冷却和润滑,以提高效率和更长的使用寿命。
 推进器的主体和螺旋桨由耐用的聚碳酸酯塑料建造,唯一暴露的金属部件由海洋级316不锈钢制成。
推进器的主体和螺旋桨由耐用的聚碳酸酯塑料建造,唯一暴露的金属部件由海洋级316不锈钢制成。
紧凑的设计,减少了部件数量,简化了操作维护。



T200海洋推进器是为各种自主和无人水下和水面平台提供动力的理想选择,用于商业和研究应用,如检查、环境监测、水产养殖、沉船探测等。它也被用作许多水下机器人比赛的首选推进器,如MATE ROV和RoboSub AUV。


 的T200一样推进器提供随时可用的盒子,并包括顺时针和逆时针螺旋桨。
的T200一样推进器提供随时可用的盒子,并包括顺时针和逆时针螺旋桨。
我们还可以提供启动和运行所需的所有其他组件,包括电子速度控制器(ESC)、电源和信号源。
规格:
| 尺寸(长度×直径) | 113 x 100毫米(4.45 x 3.9英寸) |
| 螺旋桨直径 | 66毫米(3.0英寸) |
| 空气重量(含1米电缆) | 344克(0.76磅) |
| 水的重量(1m电缆) | 156克(0.34磅) |
| 全油门前进/Rev推力 | 5.25/4.1 kg f (11.6/9.0 lb f) -标称16V 6.7/5.05 kg f (14.8/11.1 lb f) -最大20V |
| 全油门功率 | 390W -标称16V 645W -最大20V |
了解更多并在网上购买:T200水下推进器

 的Ping360是一种用于ROV导航和水声成像的机械扫描声纳,其范围为50米(165英尺),深度评级为300米(984英尺)。它在低能见度条件下提供优异的性能,是检查、避障、目标定位和跟踪等的理想选择。
的Ping360是一种用于ROV导航和水声成像的机械扫描声纳,其范围为50米(165英尺),深度评级为300米(984英尺)。它在低能见度条件下提供优异的性能,是检查、避障、目标定位和跟踪等的理想选择。


扫描ROV声纳通过360度全方位测量声波回波,可提供ROV周围环境的自上而下视图,提供物体和结构的可视性,如绳索、墙壁、码头桩子、岩石、沉船、船只和海洋生物。


 的Ping360该公司的设计特点是坚固的阳极氧化铝外壳,顶部为声学换能器充满油的部分。该设备易于安装到rov上,具有4个M3安装孔和一个包含的支架,1米(3.3英尺)长的电缆配有一个预安装的电缆穿孔器。
的Ping360该公司的设计特点是坚固的阳极氧化铝外壳,顶部为声学换能器充满油的部分。该设备易于安装到rov上,具有4个M3安装孔和一个包含的支架,1米(3.3英尺)长的电缆配有一个预安装的电缆穿孔器。
Ping360连接到我们直观的开源Ping-Viewer应用程序,便于系统控制和数据显示。Ping-Viewer可以在Windows、Mac和Linux上运行,并且可以通过直接连接到计算机或通过BlueROV2上的Companion web界面连接到Ping360。
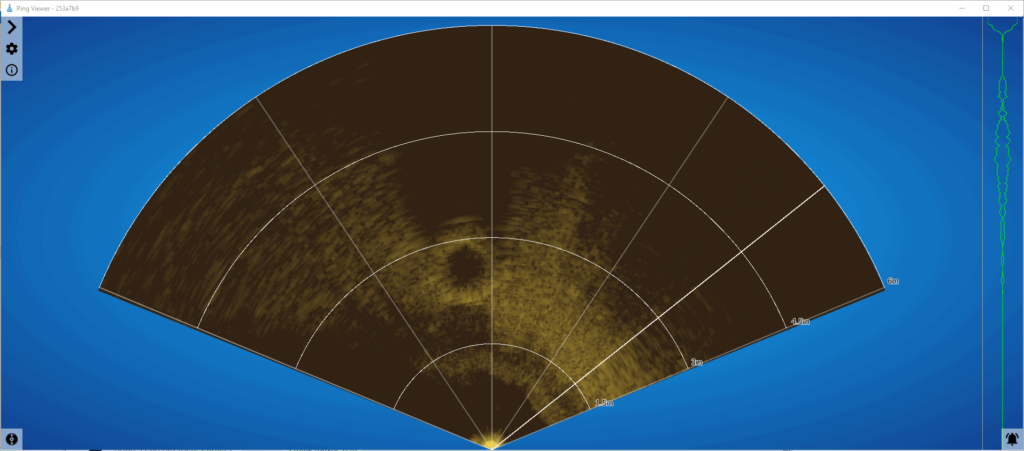
更新的Ping-Viewer界面显示轮胎发现与Ping360
Ping360的Ping-Protocol二进制消息格式允许轻松集成到广泛的系统中,我们可以提供Arduino和Python库,让开发人员尽快启动和运行。
规格:
| 尺寸(长度×直径) | 83 x 77毫米 |
| 空气重量(含1米电缆) | 510g(18盎司) |
| 水的重量(1m电缆) | 175克(6.17盎司) |
| 最大功耗 | 5 w |
| 频率 | 750千赫 |
| 波束宽度 | 2°水平 25°垂直 |
| 范围 | 0.75 - 50米(2.5 - 165英尺) |
| 距离分辨率 | 0.08%的范围 |
| 扫描速度(一圈) | 9秒@ 2m 35秒@ 50米 |
| 压力等级 | 300米(984英尺) |
了解更多并在网上购买:Ping360扫描声纳
 搜索公司和产品
搜索公司和产品




 订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。
订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。