

L3 ASV近日,美国无人和自主水面舰艇(usv / ASV)开发商发布了一项案例研究,概述了一种新型自主水下检测能力的设计和开发,该研究基于一种改进的C-Worker 7 ASV,可以部署和回收ROV(远程操作车辆)。
英国水域及周边地区的许多油气平台都已接近使用寿命,针对极端海洋环境的自主机器人干预系统(ARISE)已被开发出来,以帮助促进这些平台的监测和维护,同时将对日常业务的影响降至最低。
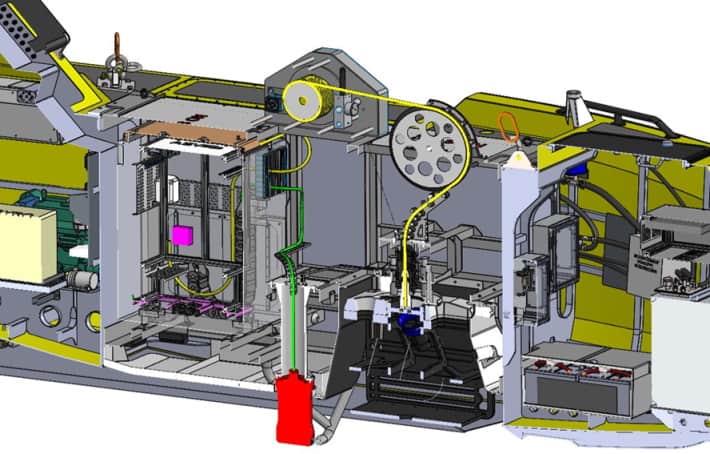
项目第一阶段测试的系统包括:
- 绞车系统与50米的缆绳和动力护套轮张力管理
- 驱动锁闩系统,在运输过程中保留ROV
- 电子外壳托管ROV和USBL上层
- 杆子安装Sonardyne迷你游侠2 USBL系统
- ROV住房
案例研究描述了系统是如何测试的,以及它是如何演变到包含来自这些测试的反馈的。为了了解更多,在L3 ASV的网站上阅读完整的案例研究。






