查尔斯河公司成立近40年来,科学家和工程师一直致力于开发尖端解决方案。作为自主系统技术的先驱,我们帮助客户实现无人系统的真正潜力,为uuv(无人水下航行器),usv(无人水面船只)和其他自主海洋航行器开发智能技术。
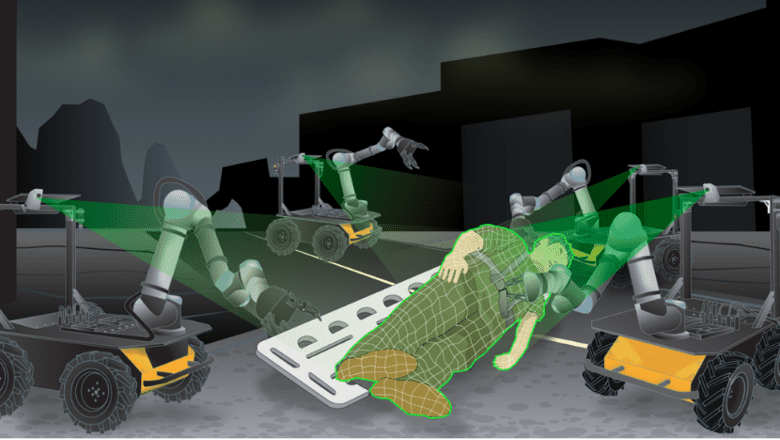
我们的工作使我们对应用机器人和自主系统有了深刻的理解,我们将继续在许多学科中应用。我们正在推进最先进的技术,以解决客户最棘手、最复杂的问题——从自动目标识别(ATR)和监控,到与机器人系统合作,从危险区域疏散伤亡人员。


查尔斯河公司成立近40年来,科学家和工程师一直致力于开发尖端解决方案。作为自主系统技术的先驱,我们帮助客户实现无人系统的真正潜力,为uuv(无人水下航行器),usv(无人水面船只)和其他自主海洋航行器开发智能技术。
我们的工作使我们对应用机器人和自主系统有了深刻的理解,我们将继续在许多学科中应用。我们正在推进最先进的技术,以解决客户最棘手、最复杂的问题——从自动目标识别(ATR)和监控,到与机器人系统合作,从危险区域疏散伤亡人员。



我们开创性的海上态势感知解决方案服务于各种各样的市场和应用,包括国防、商业航运、石油和天然气、海上风能、地质测量、执法和科学研究。




AutoTRap机上™是一款复杂的人工智能软件应用程序,可自动检测自动水下航行器(AUV)上的侧扫描声纳收集的海底图像中的物体。机载实时目标识别使您的AUV搜索,定位和调查目标,而不需要重新编程。
AutoTRap经过训练,可以探测各种感兴趣的物体,包括地雷、集装箱、石油管道、人体形态、飞机黑匣子等等。我们的团队还提供针对特定客户需求培训AutoTRap的服务,将其添加到我们现有的目标库中。
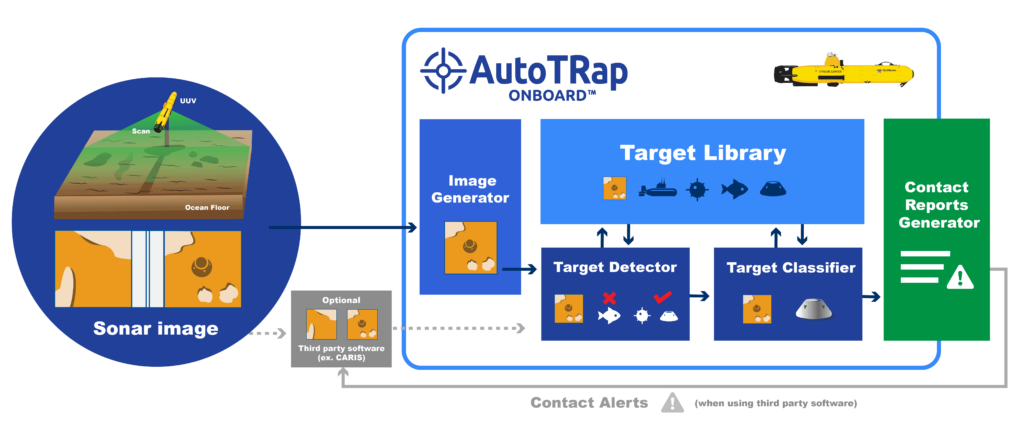
我们在Teledyne Gavia系列auv上开发、测试并部署了AutoTRap,它与其他水下航行器和声纳系统兼容,包括拖曳声纳系统。
我们的AutoTRap系统:
了解更多:机载自动目标识别软件
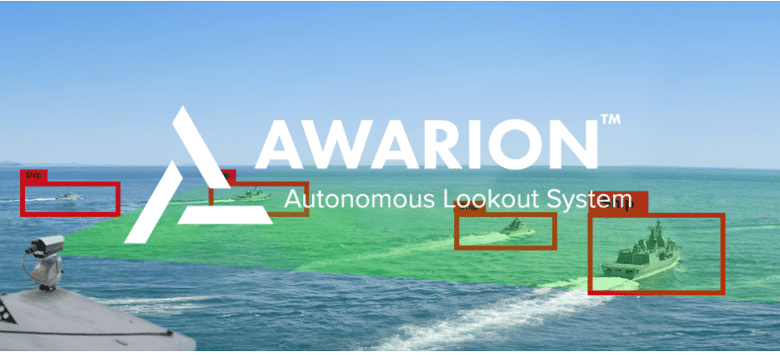

Awarion是一种人工智能和计算机视觉系统,使用光电和红外(EO/IR)视频流检测鲸鱼、船只和其他物体的存在。这些EO/IR方法旨在提供增强的海上态势感知,比雷达提供更大的细节和分辨率,为无人水面车辆(usv)提供更高的探测概率和真正的自主权。

船舶检测

容器检测
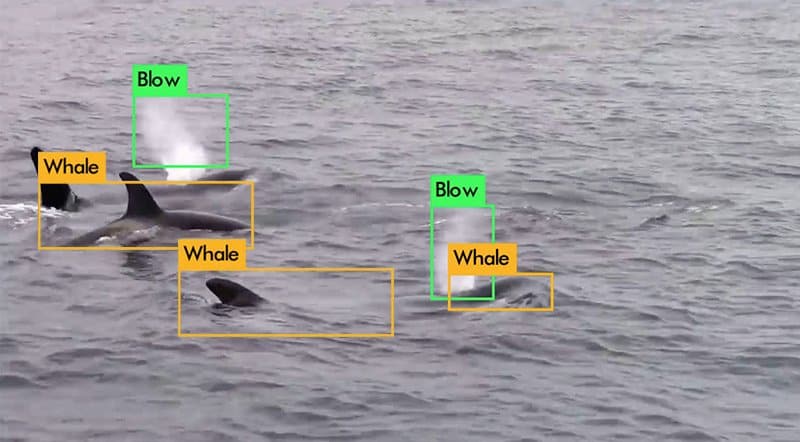
鲸鱼检测
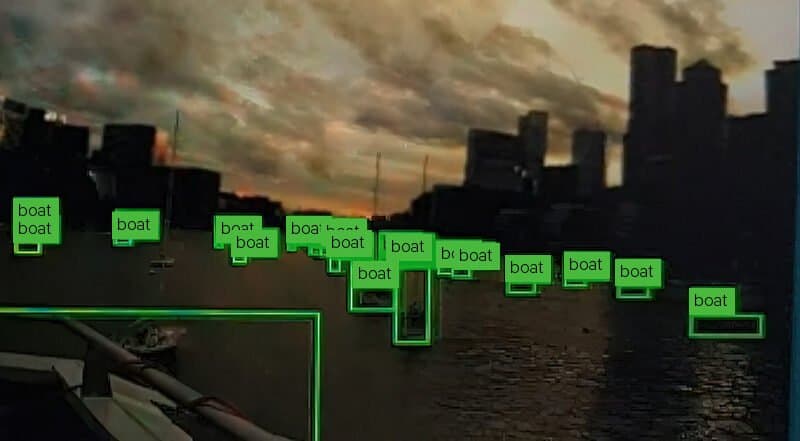
晚上检测
最重要的是,“感知”提供了持久的自主监视能力,以及轨迹建模和威胁评估。我们的系统补充和支持人类瞭望台和海洋雷达系统,直接为桥梁提供先进的分析、轨迹建模和威胁评估。
我们的船舶系统测试和开发服务由全工程人员提供支持,他们专注于智能系统的硬件原型的研究和开发。该团队专门为海洋、海军和海事应用设计系统。我们还拥有内部技术人员和工具来制造、连接、构建和集成原型,以实现快速开发和测试周期。


我们通过最先进的测试设施为政府和商业客户提供全面的海洋测试服务,全年均可进入沿海测试水域。
我们是以下方面的专家:
了解更多:船舶系统测试与开发服务
 搜索公司和产品
搜索公司和产品




 订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。
订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。