



UUV(“水下车辆)幻影
幻影水下机器人和水下机器人控制系统
 AUV / ROV自动驾驶仪
AUV / ROV自动驾驶仪
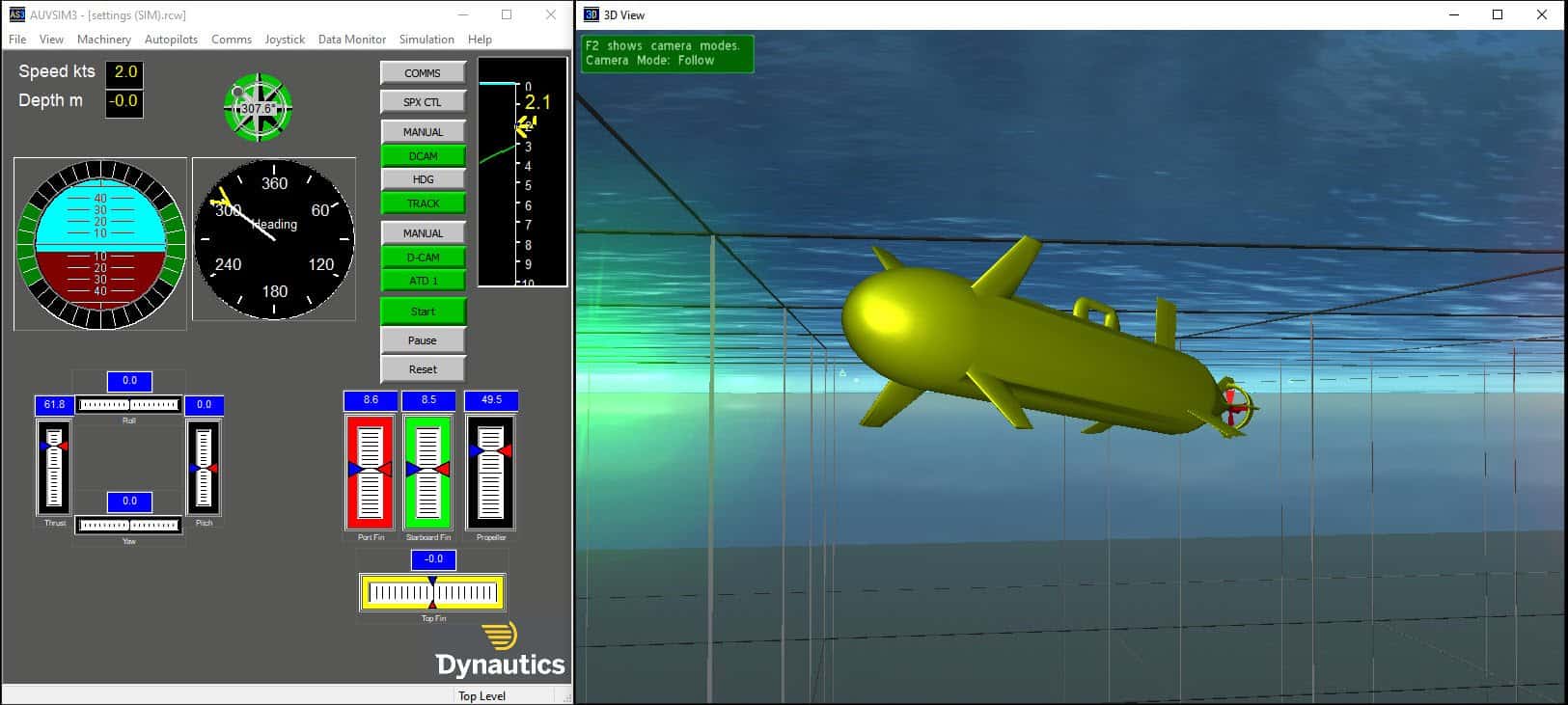
我们专业提供自主水下航行器,包括我们内部设计幻影模块化AUV上图所示和AUV控制系统控制和通信的地下汽车可以让我们扩大你的车辆的能力。通过仿真过程(Dynautics产品AUV sim)我们可以推动发展进程和提高车辆的效率。定位可以通过超声波通信和/或航迹推算。
我们提供动态定位(DP)解决方案的经验使我们能够为您提供精确位置保持,让你专注于你的任务。

AUV / ROV自动驾驶仪是基于幽灵自动驾驶仪,已经安装在水下车辆。该系统同样适合接管任何级别的控制:
- 载人潜水器,例如游泳交付船(关闭阀)和微型潜艇;
- 半潜式自主车辆有/没有物理数据链接到操作员工作站,
- 远程操作工具(ROV)与物理数据链接到操作员工作站,
- 一个水下机器人无人水下潜航器/接触支持船,
- 接触器无人水下航行器(UUV)支持船,
- 一个完全自治水下机器人无人水下潜航器/操作“发射后不管”的任务。AUV / ROV无人水下潜航器/自动驾驶仪提供标题、速度、跟踪、态度和深度/高度控制以及动态定位。





