

在本文中,OxTS讨论了在视频游戏开发中使用导航数据,特别是针对其合作伙伴之一的项目,即创建特兰西瓦尼亚环形赛道的3D点云。
3D点云的可能应用几乎是无止境的。当你想到激光雷达时,你会很自然地想到自动驾驶汽车导航或地理空间调查类型的应用。事实上,导航和激光雷达数据在各种应用中都很有用。但是,导航数据如何用于电子游戏开发呢?
当一项新技术(如激光雷达)首次推向市场时,有许多因素会影响价格。最初,每单位成本很可能很高,因为要收回研究和发展费用。然而,随着技术的发展,制造商不断创新并推出新版本,价格总是会随着时间的推移而下降。
随着这一过程的发生,它将技术交到更广泛的受众手中。因此,新的和创新用例的数量也增加了。
要创建3D点云,用户必须结合位置、导航和定时测量惯性导航系统(INS)生激光雷达数据。没有精确的INS数据,就不可能创建点云。这是因为激光雷达传感器需要知道它的位置、时间和方向。
避免复杂的软件工程工作,使用简单的软件,如OxTS Georeferencer,用于对LiDAR数据进行地理参照。一旦地理引用完成,OxTS地理引用将创建一个PCAP文件,用户可以在许多点云查看器软件应用程序中查看该文件。
点云有许多广泛而多样的用途。自动驾驶汽车开发人员可能会使用点云来帮助目标检测和避免,而地理空间测量人员可能会使用点云来确定随着时间的推移道路退化或监测海岸侵蚀的速度。
但是导航数据如何应用于视频游戏开发等应用呢?让我们先看看导航数据是如何与激光雷达一起工作的。
激光雷达和惯性导航
为了创建3D点云,原始激光雷达数据需要与INS的位置、导航和授时测量数据进行地理引用(组合)。没有精确的INS数据,就不可能创建点云,因为激光雷达传感器需要知道点云的位置、方向以及扫描发生的时间。
 为了避免复杂的软件工程工作,可以使用简单易用的软件,如OxTS Georeferencer对LiDAR数据进行地理引用。一旦地理引用,就创建了一个PCAP文件,可以在许多点云查看器软件应用程序中使用。
为了避免复杂的软件工程工作,可以使用简单易用的软件,如OxTS Georeferencer对LiDAR数据进行地理引用。一旦地理引用,就创建了一个PCAP文件,可以在许多点云查看器软件应用程序中使用。
点云一旦创建,就可以以多种方式使用它。自动驾驶汽车开发人员可能会使用点云来帮助目标检测和避免,而地理空间测量人员可能会使用点云来确定随着时间的推移道路退化或监测海岸侵蚀的速度。
然而,这些是一些更常见的用例。随着激光雷达技术变得越来越普及,使用点云的创新方法也越来越多。
广泛多样的应用
OxTS的合作伙伴Dronezone就是这样一家发现这一点的公司。
Dronezone建造并出租专业的无人机(UAV)。他们建造无人机有效载荷,包括Velodyne VLP-16激光雷达传感器和OxTS INS设备,然后将这些设备出售或出租给希望进行激光雷达测量的客户。
 Dronezone的客户已经在各种项目中使用了这种有效载荷。一位客户使用有效载荷扫描一座老化的铁路桥,寻找可能的弱点和随着时间的推移而恶化的情况。你可以在这里看到桥梁调查的结果Dronezone桥梁调查
Dronezone的客户已经在各种项目中使用了这种有效载荷。一位客户使用有效载荷扫描一座老化的铁路桥,寻找可能的弱点和随着时间的推移而恶化的情况。你可以在这里看到桥梁调查的结果Dronezone桥梁调查
Dronezone倾向于参与地理空间测绘项目,但他们看到了越来越多的需求,以满足更小众的应用程序。
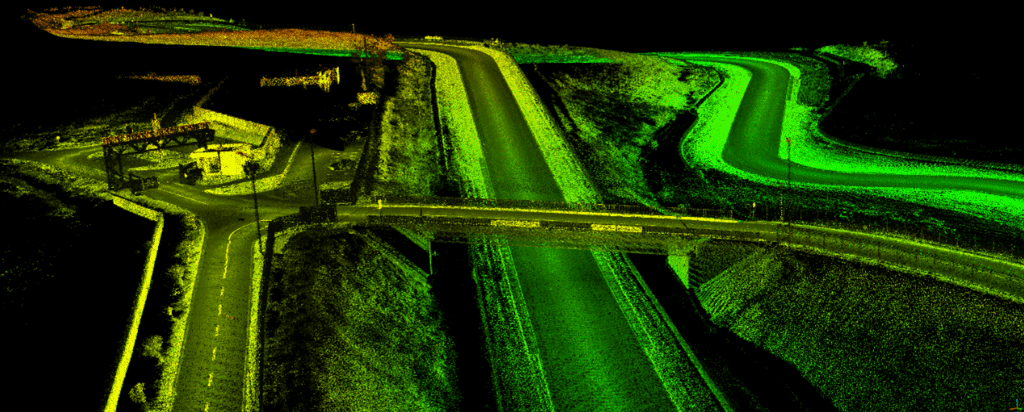
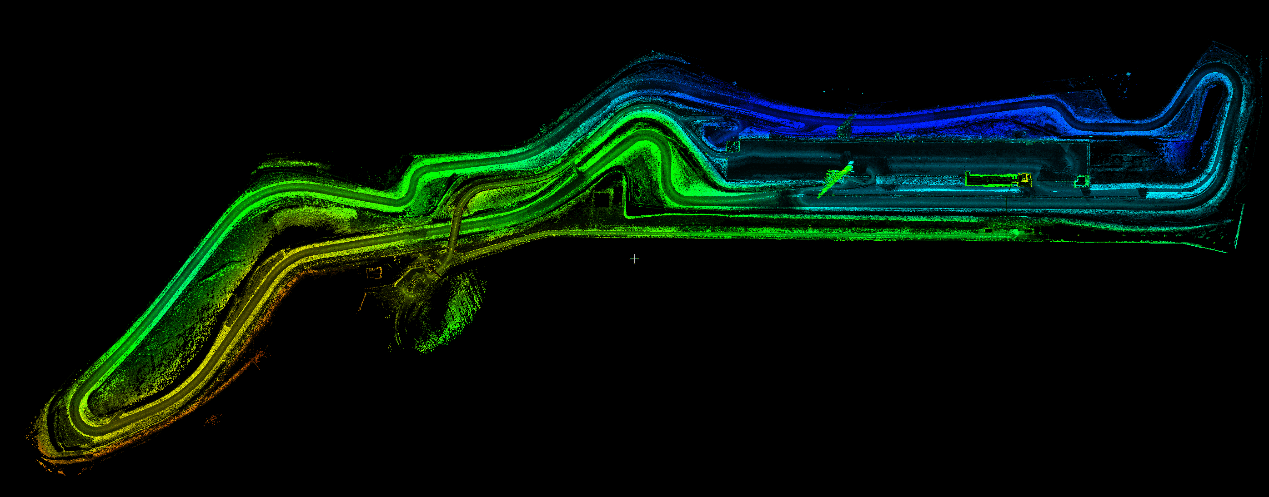
Dronezone最近进行了一个独特的项目,涉及测量特兰西瓦尼亚环赛马场。该客户是一名负责开发赛车模拟器“Assetto Corsa”的视频游戏开发者,他想要赛道轮廓的精确数字表示作为开始工作的基础。
他们向Dronezone寻求帮助,正如你从视频和截图中看到的那样,结果特别令人印象深刻。

对于这个项目,Dronezone决定摆脱传统的基于无人机的测绘。为了精确地测量轨道,他们利用无人机有效载荷的灵活性,将硬件重新用于汽车。如果有许多现成的解决方案,这是不可能的。
这个设置使Dronezone能够完成赛道的多圈,并创建一个高密度的点云,就像本文中看到的那样。

“使用不同的组件来构建无人机有效载荷意味着Dronezone可以重用硬件,并构建适合在汽车上使用的不同设置。正是这种灵活性使Dronezone能够服务于多种应用程序。”
Paris Austin, OxTS新技术产品主管
为了进一步改善结果,Dronezone使用OxTS geooreferencer中的Boresight校准功能来校准LiDAR传感器和INS的坐标帧。这一过程包括对两个回溯反射目标的简短调查,增加了最终结果的清晰度,消除了模糊和复视。
你可以在这里找到更多关于OxTS Georeferencer内的镗孔校准模块OxTS镗孔校准
数据的质量给了Dronezone信心,他们可以从同一个客户那里赢得更多的业务,为游戏绘制更多的轨道。
这只是我们目前正在与客户一起开发的新的独特应用程序的一个例子。
OxTS激光雷达测量手册
下载OxTS激光雷达测量手册,了解如何使用OxTS INS与激光雷达一起创建清晰准确的点云>>
OxTS镗孔校准手册






