

OxTS是无人机(无人驾驶飞行器)和机器人惯性传感解决方案的开发商,已宣布发布OxTS Georeferencer.新的软件应用程序旨在与该公司的INS(惯性导航系统)产品范围相结合,获取瞄准和地理参考激光雷达数据,以生成精确的3D点云。
OxTS地理参考器适用于任何有人或无人测量或移动测绘车辆的用户,包括两个主要功能;自动瞄准校准算法和输出LAS点云的基本地理参考函数。
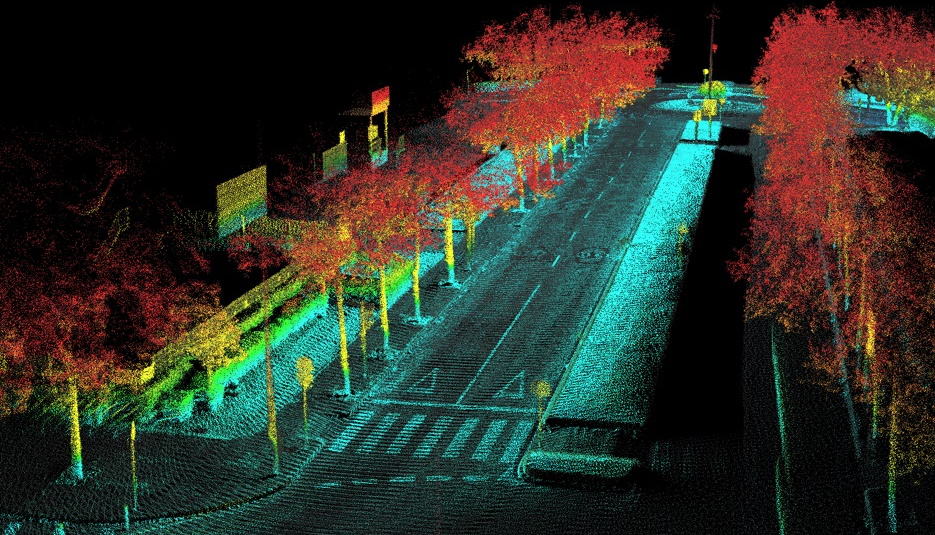
瞄准校准方法可用于智能计算LiDAR和INS设备之间的瞄准偏差,而地理参考功能可同步和融合LiDAR和INS数据集,以生成流行的LAS格式的点云。
该软件的第1版与Velodyne VLP-16激光雷达传感器以及所有OxTS INS兼容,在未来的版本中增加了更多的激光雷达模型。访问OxTS”地理参考产品页面下载该软件,并观看使用xNAV550和Velodyne VLP-16对无人机进行镗眼校准效果的演示。






