牛津技术解决方案公司(OxTS)设计和制造紧凑、可靠且易于使用的惯性导航系统(INS),将最先进的MEMS传感器与高精度GNSS接收器相结合,以提供准确和一致的结果。
我们的GNSS INS解决方案用于各种应用,包括自动驾驶车辆的传感器位置和方向,以及无人机和无人机的直接地理参考数据。


牛津技术解决方案公司(OxTS)设计和制造紧凑、可靠且易于使用的惯性导航系统(INS),将最先进的MEMS传感器与高精度GNSS接收器相结合,以提供准确和一致的结果。
我们的GNSS INS解决方案用于各种应用,包括自动驾驶车辆的传感器位置和方向,以及无人机和无人机的直接地理参考数据。
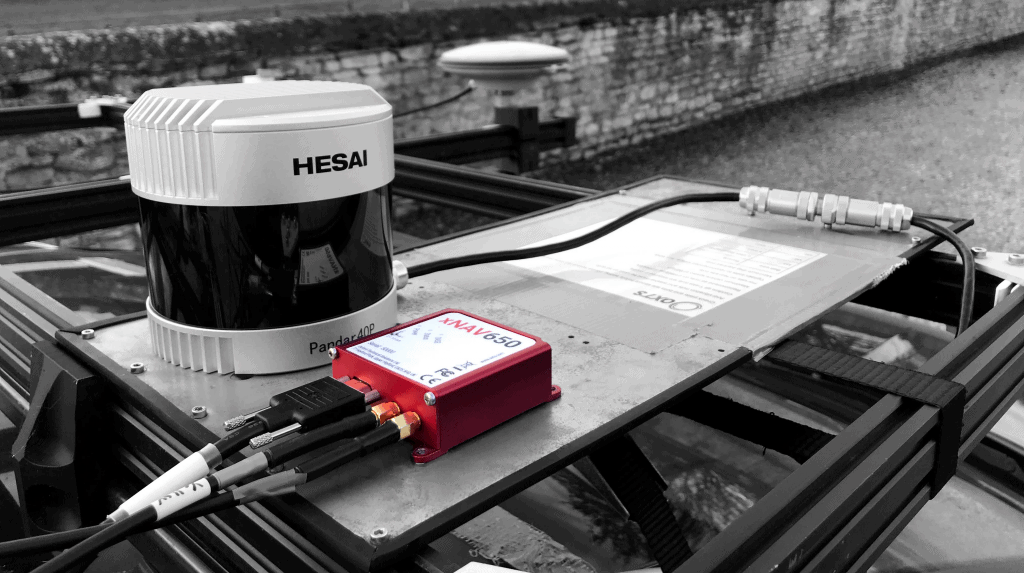
的xNAV650是我们最小和最轻的GNSS辅助惯性导航系统,结合了最新的MEMS惯性传感器技术与测量级GNSS接收机,具有卓越的精度和可靠性。
具有双天线四星座跟踪(GPS, GLONASS,北斗和伽利略),小尺寸的xNAV650是swap限制的高精度应用的理想选择,如无人机测绘和测量。即使在城市峡谷和其他具有挑战性的GNSS环境中,紧耦合系统也能提供低至2厘米的精度。
xNAV650 INS可以利用可选的精确时间协议(PTP)时间戳功能,允许与激光雷达传感器和其他无人机有效载荷同步。PTP允许通过以太网简化设置,为测量人员提供快速启动和运行的能力。

xNAV650的硬件和软件价格具有竞争力,即使在预算有限的情况下,也能为测量员提供精确、可靠的导航数据。
了解更多:xNAV650 GNSS-INS
OxTS Georeferencer
 是一款功能强大的软件工具,允许用户轻松地将来自任何OxTS Survey INS的导航数据与来自一系列领先激光扫描仪的原始激光雷达数据结合起来,以创建地理参考3D点云。
是一款功能强大的软件工具,允许用户轻松地将来自任何OxTS Survey INS的导航数据与来自一系列领先激光扫描仪的原始激光雷达数据结合起来,以创建地理参考3D点云。
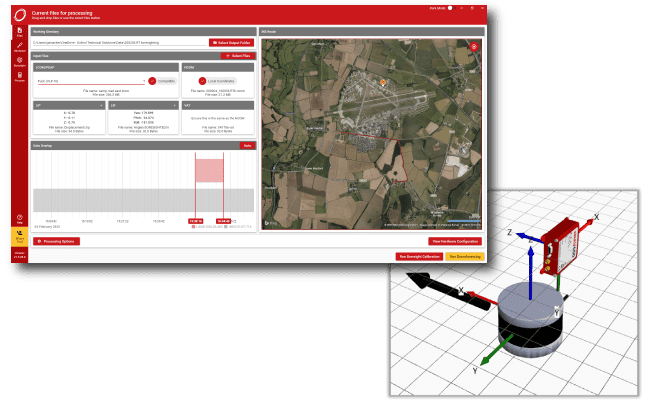
该软件包括一个方便的时间重叠图,使测量员能够在地图上可视化他们的路线,并选择他们调查的开始和结束时间。这个灵活的功能允许用户选择要查看或显示调查的哪些部分。
OxTS Georeferencer还具有3D硬件设置查看器,允许用户输入传感器的正确相对旋转角度,以及数据驱动的镗孔校准功能,为硬件的精确安装提供信心。
通过这个简短的教程视频学习使用OxTS Georeferencer的基础知识:
了解更多:OxTS Georeferencer
我们的培训网络研讨会,由我们的专家团队主办,旨在教育和支持我们的客户。网络研讨会涵盖了介绍性和专家级的一系列主题,为与会者提供了我们的技术背景,它是如何工作的以及它可以用于什么。
 搜索公司和产品
搜索公司和产品




 订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。
订阅每周电子简报
最新的工程和技术发展直接到您的收件箱-加入成千上万的工程师谁收到它。
