

在这个案例研究中,CHC导航解释了APACHE 3 USV如何使用单波束回声测深仪和安装在无人机上的AA450激光雷达扫描仪来创建水库的数字模型。
随着时间的推移,由于地理信息不准确或过时,导致实际和初始设计数据之间的差异,管理大型水库可能具有挑战性。为了有效维护水库,必须利用先进的测量手段,如激光雷达扫描仪测绘和无人驾驶车辆,及时提供准确的储水量监测和计算,以及水文条件的预测和模拟。
关于项目
在这个为期一天的项目中,使用水文USV获取水下地图,使用配备激光雷达扫描仪的无人机获取水库边界和地形数据,可以简化和高效地管理大型水库。
的Apache 3 usv配有单波束回声探测仪和AA450激光雷达扫描仪安装在无人驾驶飞行器用于测量水位以上和水位以下。此外,aGNSS RTK智能天线作为一个基站运行。
第一阶段-进行水深测量
一次水深测量包括三个主要步骤:准备、测量和数据处理。
步骤1。准备。
在调查前,由于没有GNSS RTK网络,需要安装GNSS基站,设置控制点,并进行现场校准,参照建立地图。
对于测量目标,我们可以提前在软件中设定好路线;然后,船将沿着路线自动测量(在这个项目中是什么),或者我们可以在下一步的调查中使用远程控制来操作船。
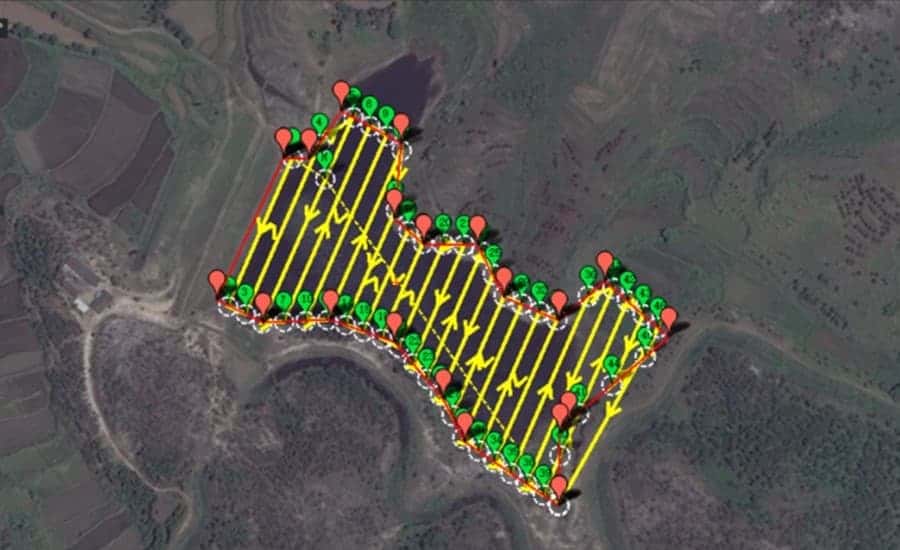
图1。Apache 3 USV自主航行的路线规划。
步骤2。测量。
在测量过程中,软件按照规定的路线对测点进行定位。测试线上锚点之间的距离按照测量比例进行加密,保证在规定范围内与主测试线上有收敛点。每条检查线与主测量线的交点进行比较。

图2。阿帕奇3 USV是一种携带单波束回声测深器的便携式海上无人机,正在进行水文调查。
步骤3。数据处理。
CHCNAV HydroSurvey 7软件由Apache 3 USV提供,用于管理原始数据收集、测绘、定位、实时轨迹显示、数据处理和坐标系统。
该软件集成了数据采集和后处理功能。它支持标准GPGGA和SDDPT水深数据和DWG/DXF格式,具有层编辑、隐藏和显示功能。
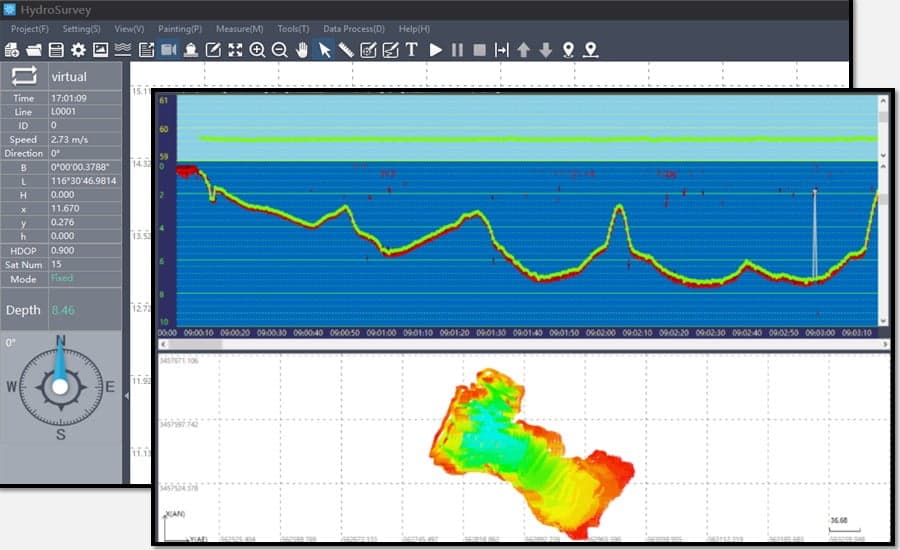
图3。水文测量软件中的数据处理。
根据不同高程下的不同库区,得到相应的库容并进行处理。
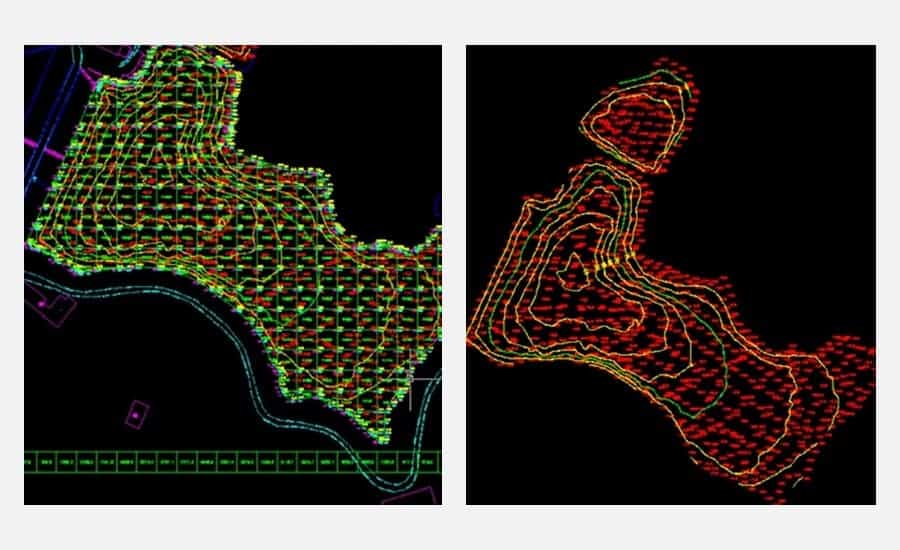
图4。水下标高及水库面积、库容计算。
第二阶段-进行航空测量
与前一阶段一样,进行空中调查有三个步骤:准备、测量和数据处理。
步骤1。准备。
在使用携带激光雷达+RGB系统(Alpha Air 450)的无人机(UAV)收集扫描仪和图像数据之前,有必要在项目现场附近的开放天空安装一个GNSS基站。
根据所使用的GNSS站的模式,航空测量可以以实时方式进行,也可以以记录静态数据的后处理方式进行。

图5。AlphaAir 450激光雷达(AA450)系统,内置IMU, GNSS, 3D扫描仪和RGB摄像头。
步骤2。激光雷达数据和图像采集
AA450激光雷达扫描仪具有一键式工作流程控制系统,可以通过一键式按下进行任何测量。
在收集项目的航空数据时,使用CHCNAV CoPre软件-一种与AA450一起提供的3D激光扫描预处理软件,通过USB-C电缆将数据传输到计算机。
步骤3。数据处理
第一步,利用CoPre软件将激光原始数据与POS数据结合,生成地理参考点云数据;在第二步中,将原始图像和POS数据结合起来生成数字正交模型(DOM)。地面点云数据在CoProcess现实捕获后处理软件中进行分类,生成数字高程模型(DEM)。
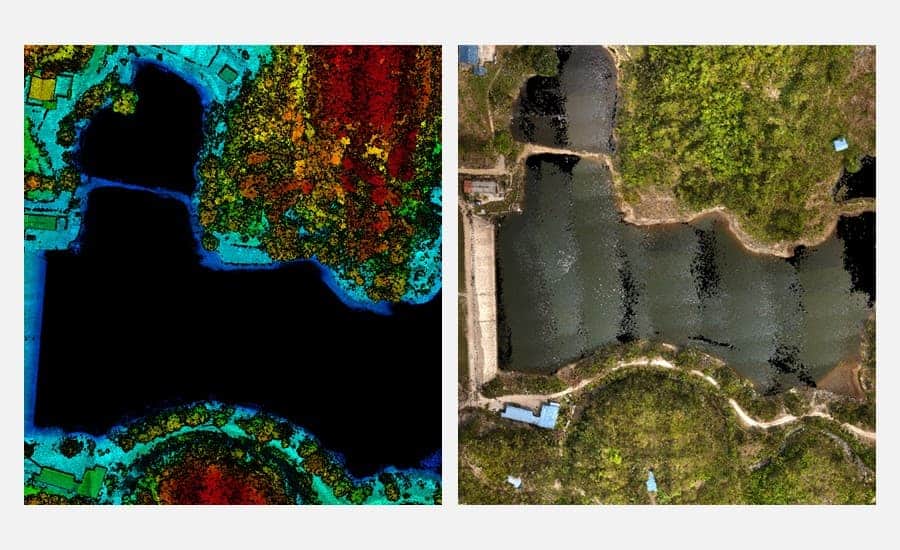
图6。原始激光点云数据(左)和彩色点云(右)。
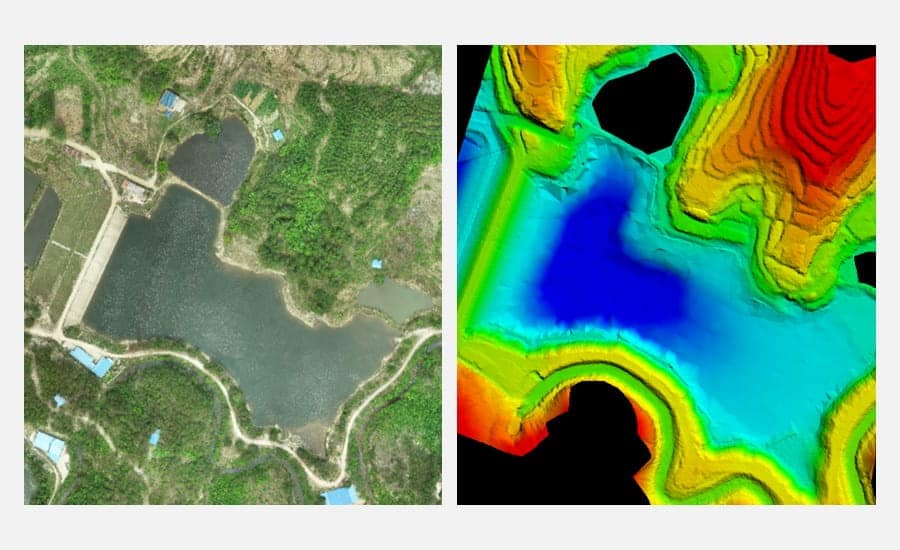
图7。数据处理后的储层DOM(左)和DEM(右)。
第三阶段-计算水库容量
在此阶段,建立了储层的虚拟模型。以米为单位的水位和以立方米为单位的容量被高效准确地计算出来并显示在图表上。
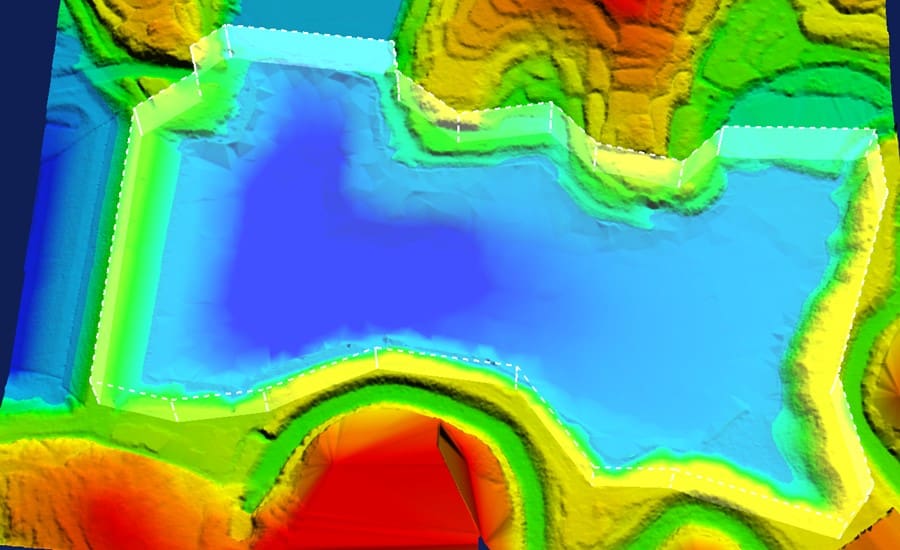
图8。与当前水位相比,可用水价值的三维建模。
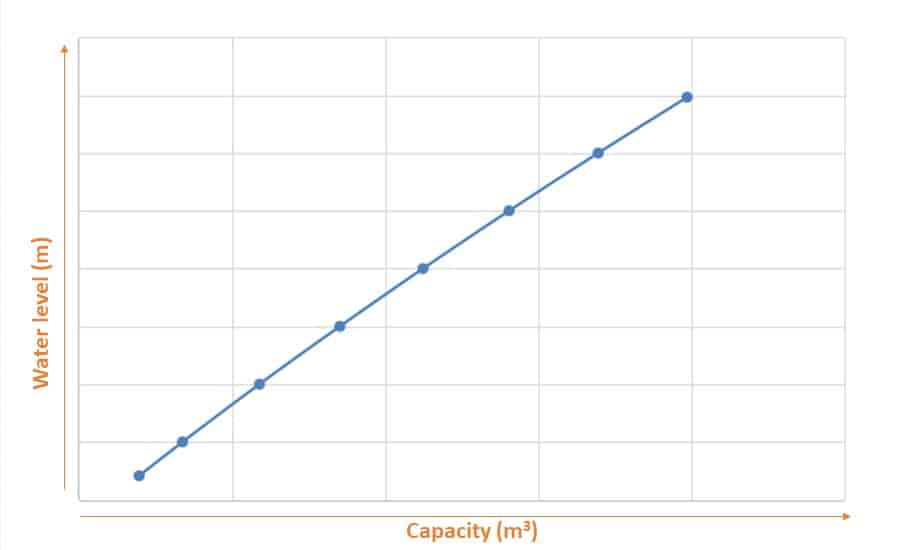
图9。水库的水量示意图。
通过使用激光雷达扫描仪、无人机和usv等新技术,现在有可能提高获取水库地形和计算其存储容量的准确性和时间。因此,大幅度降低了调查成本,提高了长期维护过程的效率。利用储层数字化模型,可以丰富测绘成果,模拟、监测和预测未来发展。






