

Voyis为自动水下航行器(auv)和远程操作航行器(rov)开发水下激光扫描仪和成像系统的公司,发布了以下文章,详细介绍了用于水下机器人航行器进行水下管道自动化检查的一些传感器技术。
海底管道是海上油气生产的重要组成部分,也是海底勘探界讨论最多的话题之一。对这些资产的持续检查对于降低环境风险至关重要,同时也允许以更外科的方法进行维修和维护。多年来,管道检查技术已经从手动的“点击和滚动”方法发展到现在的地步,我们拥有实时3D模型,通过机器学习实现自动事件和报告。这是迈向“管道自动化检测”的前提。
随着auv使用的增加和海上油气预算压力的增加,自动化管道检测已成为新标准。最新的技术和传感器套件提供了几年前还遥不可及的数据质量,使公司能够对水下资产做出客观和明智的决策。下面列出的是对自动化管道检测至关重要的最新海底传感器技术。

与3D激光相比,历史多光束数据
水下动态激光扫描仪
超高分辨率的真实尺度3D点云模型,为自动化和实时机器学习提供可量化的数据。能够检测异常,包括凹痕、屈曲、非圆度,并通过建模自由跨距、附近碎片、阳极体积/损耗率和管道运动实现预测性维护。由激光扫描系统(如Voyis Insight产品线)提供的行业领先的分辨率,可以实现管道跟踪、异常事件和结构参考,为高级功能解锁最佳3D数据。
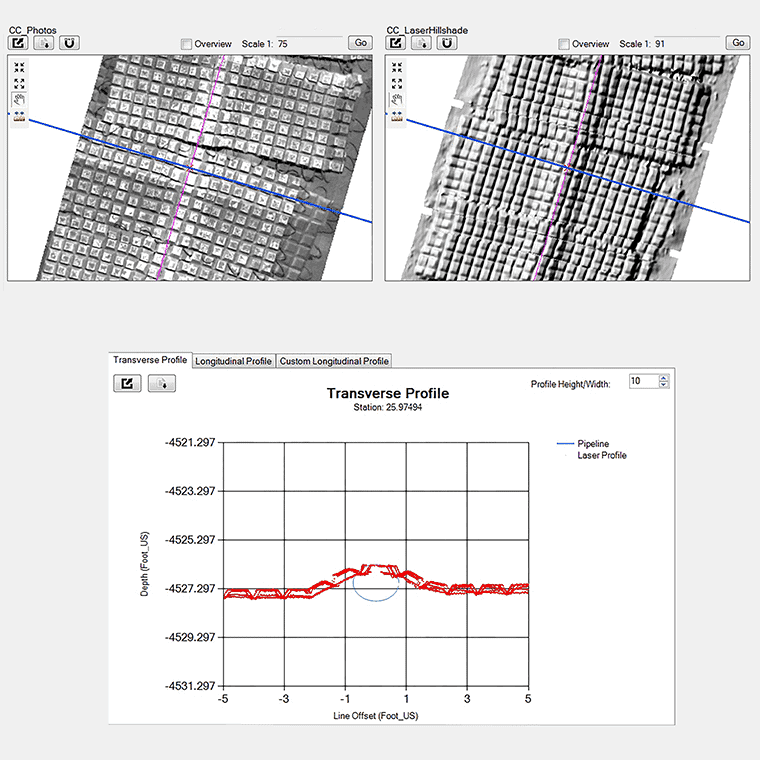
海底管道上混凝土垫层的Voyis 3D激光数据
照片的相机
清晰清晰的静态图像与时间同步的地理标记,所有同时操作与激光扫描系统。最新的超灵敏sCMOS传感器与高效节能的LED频闪灯相结合,为在高速行驶时进行有用的成像铺平了道路。海底专用静态相机能够生成照片马赛克,可以覆盖在3D激光模型上进行综合分析。选择具有高级参数的系统,如高动态范围(位深)和极高的灵敏度,如Voyis Observer产品线,将允许用户通过实时图像增强/校正获得更多的图像。

海底管道彩色图像
定位的解决方案
实时测量管道需要测量级定位解决方案,否则所有传感器都没有实际参考。非测量级定位解决方案将产生局部漂移并影响测量精度。定位方案包括一个惯性导航系统(INS),带有耦合多普勒速度测井(DVL)、USBL/LBL应答器、深度传感器和声速传感器(SVS)。这些定位传感器提供了高度精确、时间同步的位置参考,既可以实现动态3D建模,也可以在现实世界的坐标中了解资产特征。SprintNav和ROVNav产品线是适用于自动化管道检测的测量级定位组件的完美例子。
三维测绘声纳系统
包括合成孔径声纳、侧扫描声纳、多孔径声纳和多波束回声测深仪,这些传感器为一般检查和鉴定提供免费的低分辨率数据。这些声纳系统在大多数水域条件下都能发挥作用,可以生成周围海床和资产的更广泛模型,同时提供对潜在问题区域的初步探测,并通过更高分辨率的传感器进一步验证。
基底分析器
一种能够提供地下资产可量化模型的传感器。这些声波信号穿透海底,可以了解埋在地下的管道,同时也有利于定位和自动跟踪管道。
非接触式AUV集成阴极保护系统
Ocean Floor Geophysics提供了一种相对较新的解决方案,可以进行非接触式阳极测量,而无需停止并刺穿每个阳极。当AUV通过管道时,该探头阵列监测电势,自动定位和评估阴极保护的健康状况。该传感器可以更深入地了解电化学电位,因此可以独立于用激光和成像溶液评估的阳极尺寸测量,并进行阳极健康测量。
利用这些传感器进行自动管道检测,将提高管道测量的数据质量和准确性,还可以通过自动化简化分析。水下检查的未来以及自动化在加强调查中的作用将有助于缩短得到结果的时间,简化数据分析工作流程,同时为决策提供确定性。增强对机器学习的信心可以使我们减少海上人员,并通过远程操作站和陆上评估推动基于云的基础设施,最终提供更安全的工作场所以及具有成本效益的项目实施。






