

Voyis发表了一篇文章,讨论了远程操作机器人(rov)和自主水下机器人(auv)之间的区别,两者都可以携带仪器,采集样本,进行调查,同时允许研究人员从远处跟踪它们的进展。
 今天,我们依靠机器人水下航行器,配备了强大的传感器,让我们去偏远地区调查大面积的深海。这些交通工具在不断发展,获得了新的功能,使我们能够比以前走得更远。
今天,我们依靠机器人水下航行器,配备了强大的传感器,让我们去偏远地区调查大面积的深海。这些交通工具在不断发展,获得了新的功能,使我们能够比以前走得更远。
虽然载人潜水器已经允许人类进入4000米以上的深度,但它们复杂、风险高、操作成本高,使得它们无法进行大规模的调查。
目前,在深海研究中使用的是两种交通工具:远程操作交通工具(rov)和自主水下交通工具(auv)。两者都是工程上的奇迹,可以携带仪器,采集样本,进行调查,同时让研究人员可以在安全的船上跟踪它们的进展。
什么是rov ?
ROV是一种从水面上操作的水下航行器。它通过缆绳与控制器相连。在一天的探索结束后,船上的工作人员可以通过系绳收回ROV。它还限制了ROV可以独立航行到离研究船多远的地方。系绳的长度可以根据项目和ROV的深度等级而变化。
一旦进入水中,rov就有许多不同的用途。通过使用ROV滑橇,该运载工具可以连接激光扫描仪和成像系统,为海面上的团队提供海洋深处的视图。ROV可以将视频和图像发送到水面,照亮水下可能存在的东西。
我们用于检查和工作级ROV的Perception ROV滑板有助于简化激光扫描仪和成像系统的集成,而不影响车辆动力学。该系统集成了共定位惯性导航系统(INS)和多普勒速度测井(DVL),并可进行工厂校准,以避免现场补丁测试。这些滑板是为行业领先的ROV平台设计的,可以适应您现有的车辆。整个滑橇的电力分配和通信通过单一连接,大大提高了海上一体化。
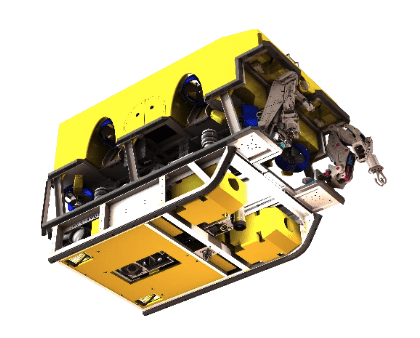
Voyis的Perception ROV在工作级ROV上打滑
使用栓系式rov的核心优势之一是能够实时查看捕获的数据集,使作业者能够验证在调查中捕获的信息的质量。这对于检查海上资产(如管道或海底结构)等作业至关重要,以确保捕获足够的数据来监测现场状况,以及是否需要进行干预。根据这些实时反馈,作业者可以快速调整测量任务目标,解决眼前的问题,而不必等待测量完成。对于资产所有者来说,在不断变化的海底环境中进行检查时,这种灵活性至关重要。
尽管远程操作车辆消除了人类的存在以降低成本并提高安全性,但其缓慢的速度也使其在捕获广域数据集时效率低下。对于这些操作,理想的平台是自主水下航行器,可以下潜到6000米以上的深度,以6节的速度航行,并可以携带广泛的传感器有效载荷。
什么是auv ?
AUV代表自主水下航行器,也被称为无人水下航行器。这些车辆可用于水下调查任务,如广域勘探,探测和绘制水下沉船、岩石、管道和可能对航行造成危险的障碍物。
自动水下航行器在没有操作员干预的情况下执行调查任务。任务完成后,AUV将返回预先编程的位置,在那里可以下载和处理数据。
虽然机组人员在将auv放入水中之前对其进行了编程,但有些人可以根据他们在水中遇到的情况,在飞行中改变编程或调整任务。通常,自动水下航行器有传感器,可以检测水温和其他条件。根据收集到的信息,AUV可能会改变航向或提前完成任务。
我们的Recon AUV有效载荷允许激光扫描仪和成像系统连接到车辆上,使用预集成有效载荷简化了集成,并允许您高速捕获令人难以置信的光学数据。

Voyis的Recon AUV有效载荷开发用于与L3Harris IVER4集成
使用auv进行广域探测的概念由Ocean Infinity和他们的HUGIN auv在搜索MH370飞机残骸时展示。在他们的搜索过程中,他们注意到他们的船队平均减少了72%的二氧化碳排放,并在短短138天内覆盖了12.5万平方公里的海床,这与一般测量船需要837天的时间相去甚远。有了这一令人难以置信的成就,很明显,auv使研究人员能够以更低的成本进入深海,减少对环境的影响。但这仅仅是个开始。拥有紧密集成的高分辨率传感器对于提高我们对世界最后前沿的理解至关重要。






